求助,在使用interdymfoam得到结果以后如何计算得到船舶的纵倾与横摇呢
-
@liujiayi 在 求助,在使用interdymfoam得到结果以后如何计算得到船舶的纵倾与横摇呢 中说:
@bestucan 在 求助,在使用interdymfoam得到结果以后如何计算得到船舶的纵倾与横摇呢 中说:
你这个句子都不是很通顺啊。。。
orientation大概就是船体的朝向了。想要算纵倾和横摇得确定两个时间点吧。
两个时间点,就有两个orientation。然后就是三维空间中两条线的夹角计算。我的意思就是在得到了orientation的九个张量以后,如何计算出来船舶的纵倾和横倾,
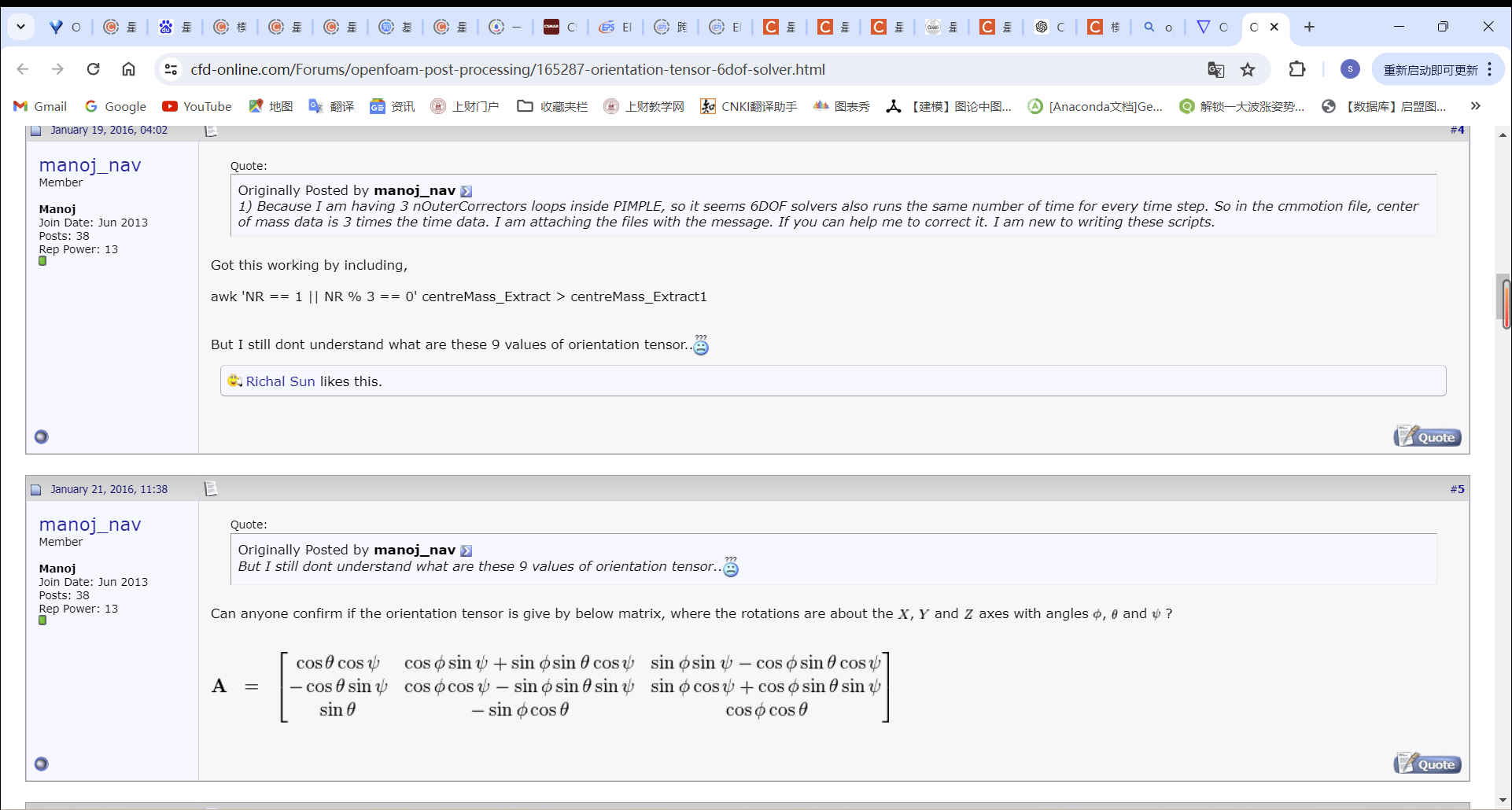 ,我在国外cfd网站上看到了有人用这种方式求出倾角,这么算对吗?求大佬指点。
,我在国外cfd网站上看到了有人用这种方式求出倾角,这么算对吗?求大佬指点。用四元数转化,quaternion(Q()).eulerAngles(quaternion:XYZ),大概这样
-
-
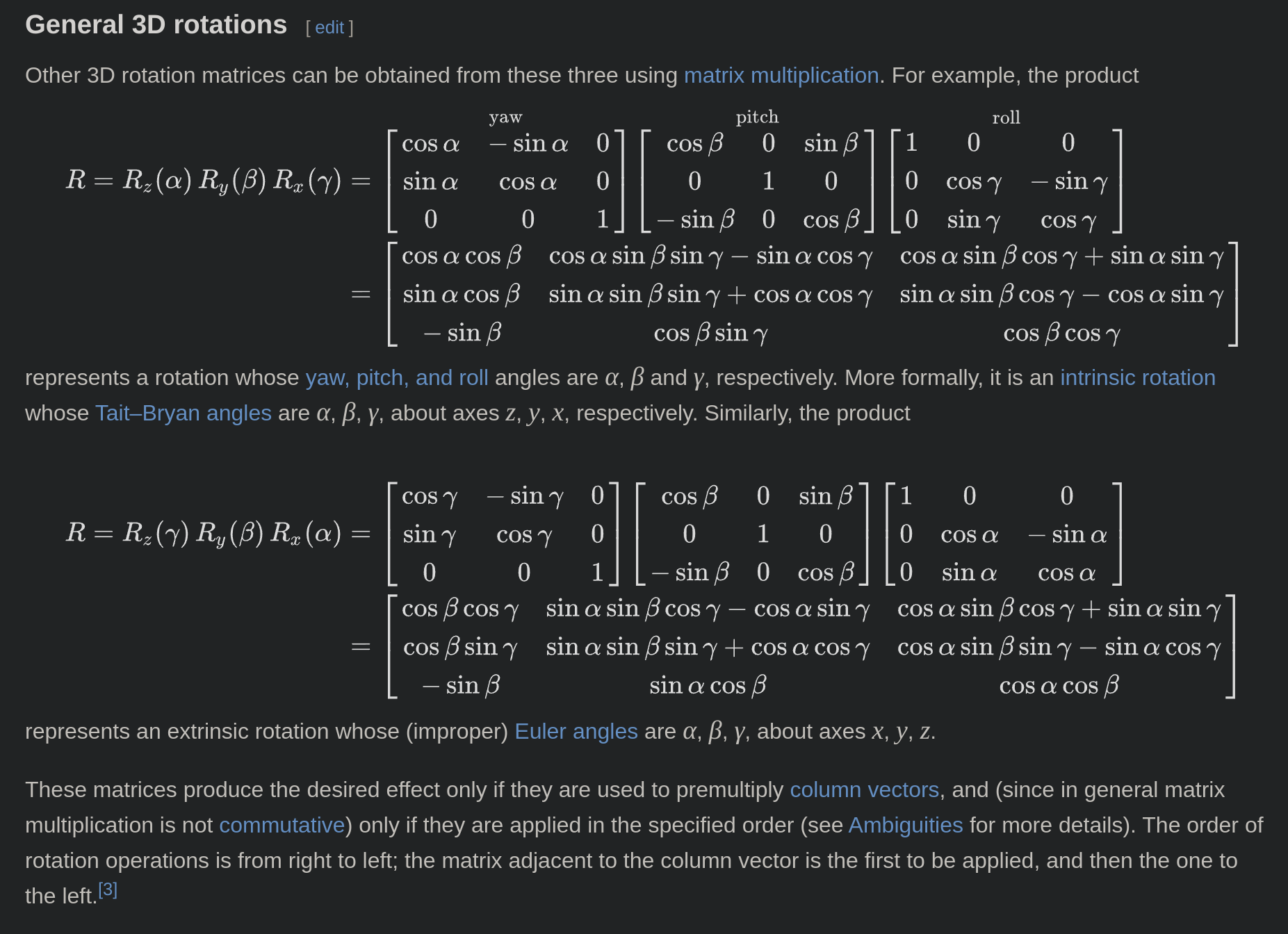
@CFDngu 我看了搜了一大堆也没搞懂。但是可以明确一点。这个操作不是“把旋转分两次完成”。因为矩阵没有交换律,所以先转后转不一样,这是matlab测试代码
Rx = rotx(36); Ry = roty(20); Rz = rotz(80); ori = Rx * Ry * Rz Rx2 = rotx(18); Ry2 = roty(10); Rz2 = rotz(40); split1 = Rx2 * Ry2 * Rz2 * Rz2 * Ry2 * Rx2 split2 = Rx2 * Rx2 * Ry2 * Ry2 * Rz OUTPUT: ori = 0.1632 -0.9254 0.3420 0.8316 -0.0575 -0.5523 0.5308 0.3746 0.7602 split1 = 0.1383 -0.8604 0.4906 0.9844 0.0650 -0.1635 0.1088 0.5055 0.8559 split2 = 0.1632 -0.9254 0.3420 0.8316 -0.0575 -0.5523 0.5308 0.3746 0.7602split1就是OF里的操作,和ori完全不一样。
split2和ori结果一样,因为只是旋转分成两次,而不是还交换顺序
旋转的内容好像也不是角度?
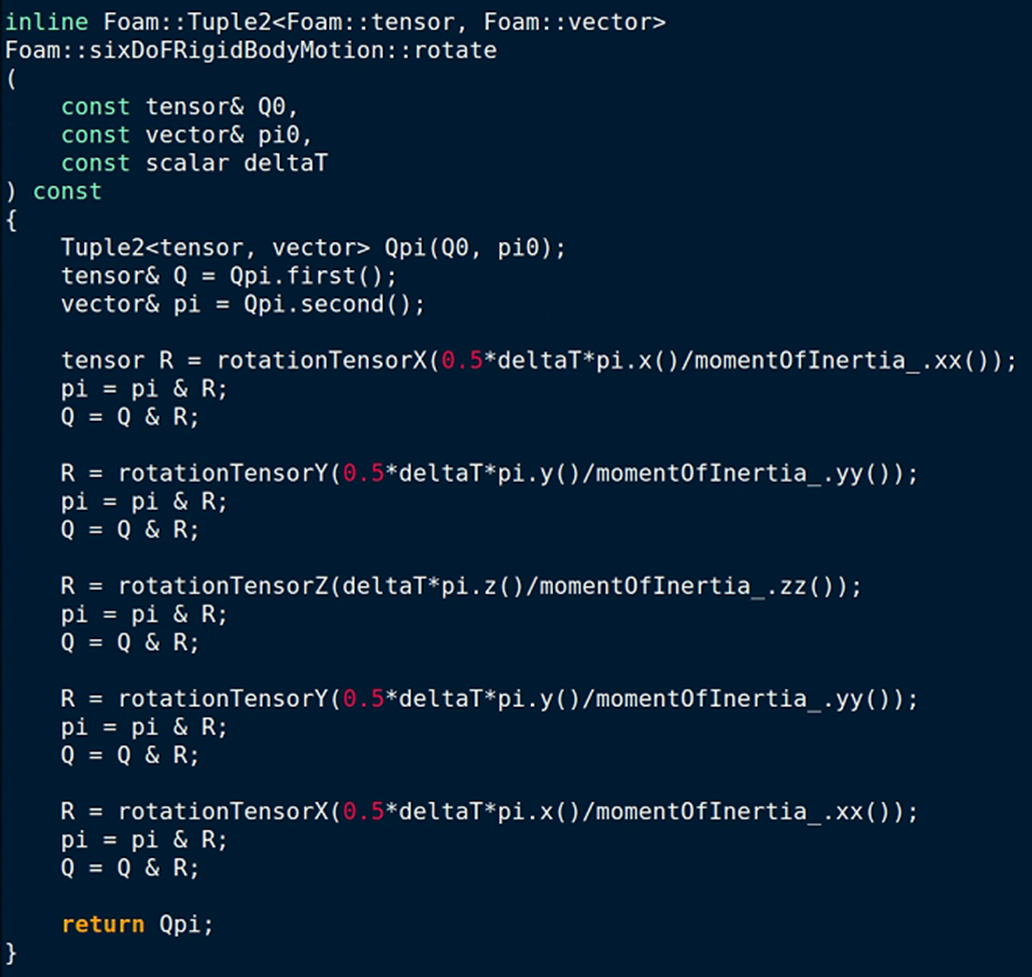
pi是力矩相当于“旋转”中的力。惯性矩相当于“旋转”中的质量。力除以质量是加速度。加速度乘以时间是速度增量。当然这里的"速度"是“旋转”中的速度,即角速度。1/2 * t * a是啥,参考匀变速运动公式,还是能找到挺多意义的。但是把这些东西乘起来。。。猜不出来。得结合更多的代码上下文看了。不过我没用过这个求解器,不太了解。 -
@bestucan
pi是角动量,除以转动惯量就是角速度,再乘以时间步长就是角度变化量,用来构建旋转矩阵。最近,我又看了看相关资料,发现两处比较有意思的地方:
1、6DoF定义的orientation叫做“rotation tensor”,我查过一些资料,好像tensor的旋转和vector的旋转不太一样;
2、这个旋转矩阵应该是按照左手定则来定义的,旋转向量时,pi & R 实际上执行的是R.T()*pi,左乘转置。上面两处是我个人的理解,不保证对。希望有大神能搞清楚这一块,指导一下,谢谢!(PS:虽然搞不清楚此处旋转为什么这样定义,但不能否认的是6DOF的计算准确性是可以的)
-
@CFDngu 这个运算符重载真是。。。放右边结果是左乘。。。
无论是左乘还是右乘,都没有交换律。所以,应该都不是一个角度分两次旋转、旋转顺序的问题。然后
6DoF定义的orientation叫做“rotation tensor”
这个,是因为,应该是这样的:所有船体与外界的交互,都是基于世界坐标系的。所以要把世界坐标系的力应用到船体上,就要把力之类的各种矢量张量旋转到船体坐标系去和船体交互。
还有另外一个猜测。两个坐标系之间的转换,可以通过三个旋转矩阵达到。也可以通过一个旋转轴和一个旋转矩阵达到。
我猜测,可能这个
0.5Rx-0.5Ry-Rz-0.5Ry-0.5Rx
是在组那一个旋转矩阵,或者找那一个旋转轴。如果有了这个特殊的旋转轴,那么船体的"orientation"就确实是“rotation tensor”了
以上都是我猜的
_(:3」∠)_哦,对了,这句"所以要把世界坐标系的力应用到船体上,就要把力之类的各种矢量张量旋转到船体坐标系去和船体交互。"不是猜的。是代码注释:
Angular momentum stored in body fixed reference frame. Reference orientation of the body (where Q = I) must align with the cartesian axes such that the Inertia tensor is in principle component form. Can add restraints (e.g. a spring) and constraints (e.g. motion may only be on a plane).
The time-integrator for the motion is run-time selectable with options for symplectic (explicit), Crank-Nicolson and Newmark schemes.
我应该理解对注释了吧