OF5版本以后重心坐标与绝对坐标的相互转换的问题。
-
最近在研读OpenFOAM中particle类的barycentric coordinates 和global coordinates转换矩阵的程序,遇到一点问题,现总结出来和大家讨论一下。
OF5.0以后对颗粒追踪采用了barycentric方法,目的是更好的捕捉颗粒轨迹与tetrahedra网格面的交点,四面体内任意一点$\mathbf{p}$的global coordinates 可以表示为barycentric coordinates ($\lambda_i$)与顶点的乘积和:
\begin{equation}
\label{eq:barycentric coordinates}
\mathbf{p}=\sum_{i=1}^{4}\lambda_i\mathbf{v_i}
\end{equation}
其中$\mathbf{v_i}$是四面体顶点坐标。
示意图如下:
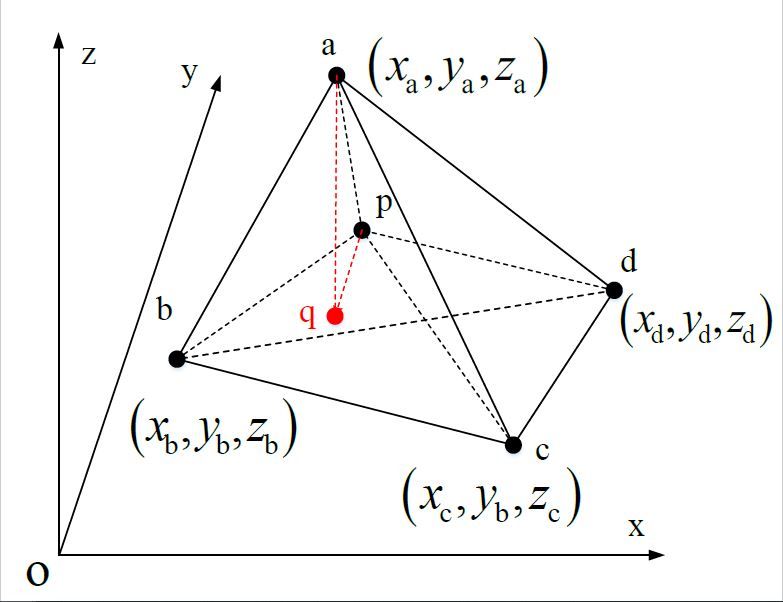
如上图,四面体中有一点$\mathbf{p}$,则$\mathbf{p}$点的重心坐标($\lambda_1,\lambda_2,\lambda_3,\lambda_4$)的计算方法为点$\mathbf{p}$将四面体分成的四个小四面体与大四面体的体积之比:
\begin{equation}
\label{eq:lambda1}
\lambda_{1}=\frac{V_{\rm{pbcd}}}{V_{\rm{abcd}}}=1-\lambda_{2}-\lambda_{3}-\lambda_{4},
\end{equation}
\begin{equation}
\label{eq:lambda2}
\lambda_{2}=\frac{V_{\rm{pacd}}}{V_{\rm{abcd}}}=\frac{6V_{\rm{pacd}}}{6V_{\rm{abcd}}}=\frac{\mathbf{ap}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)}{\mathbf{ab}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)};,
\end{equation}
\begin{equation}
\label{eq:lambda3}
\lambda_{3}=\frac{V_{\rm{pabd}}}{V_{\rm{abcd}}}=\frac{6V_{\rm{pabd}}}{6V_{\rm{abcd}}}=\frac{\mathbf{ap}\cdot\left(\mathbf{ad}\times\mathbf{ab}\right)}{\mathbf{ab}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)},
\end{equation}
\begin{equation}
\label{eq:lambda4}
\lambda_{4}=\frac{V_{\rm{pabc}}}{V_{\rm{abcd}}}=\frac{6V_{\rm{pabc}}}{6V_{\rm{abcd}}}=\frac{\mathbf{ap}\cdot\left(\mathbf{ab}\times\mathbf{ac}\right)}{\mathbf{ab}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)},
\end{equation}
其中 $V_{\rm{pbcd}}$, $V_{\rm{pacd}}$, $V_{\rm{pabd}}$, 和 $V_{\rm{pabc}}$ 是小四面体的体积, $\mathbf{ap}=\mathbf{p}-\mathbf{a}$, $\mathbf{ab}=\mathbf{b}-\mathbf{a}$, $\mathbf{ac}=\mathbf{c}-\mathbf{a}$, $\mathbf{ad}=\mathbf{d}-\mathbf{a}$.
定义从barycentric coordinates到global coordinates的转换矩阵$\mathbf{A}$,则
\begin{equation}
\begin{aligned}
\label{eq:barycentric to global}
\mathbf{p}=\mathbf{A}\boldsymbol{\lambda}\left(\mathbf{p}\right)\rightarrow
\begin{bmatrix}x_{\rm{p}}\\y_{\rm{p}}\\z_{\rm{p}}\end{bmatrix}=
\begin{bmatrix}x_{\rm{a}}&x_{\rm{b}}&x_{\rm{c}}&x_{\rm{d}}\\y_{\rm{a}}&y_{\rm{b}}&y_{\rm{c}}&y_{\rm{d}}\\z_{\rm{a}}&z_{\rm{b}}&z_{\rm{c}}&z_{\rm{d}}
\end{bmatrix}
\begin{bmatrix}\lambda_1\\
\lambda_2\\
\lambda_3\\
\lambda_4\end{bmatrix};.
\end{aligned}
\end{equation}
其中$\lambda_i$就是$\mathbf{p}$的重心坐标,矩阵$\mathbf{A}$就是由四面体各个顶点的global coordinates组成的坐标矩阵。
既然有了正向变换,同样需要逆向变换,定义一个逆向变换矩阵$\mathbf{T}=\left[\mathbf{bd}\times\mathbf{bc}\quad\mathbf{ac}\times\mathbf{ad}\quad\mathbf{ad}\times\mathbf{ab}\quad\mathbf{ab}\times\mathbf{ac}\right]$将global coordinates转换为barycentric coordinates:
\begin{equation}
\label{eq:global to barycentric}
\boldsymbol{\lambda}=\frac{\mathbf{ap}\cdot\mathbf{T}}{\rm{det}\mathbf{A}}=\frac{\left[\mathbf{ap}\cdot\left(\mathbf{bd}\times\mathbf{bc}\right)\quad\mathbf{ap}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)\quad\mathbf{ap}\cdot\left(\mathbf{ad}\times\mathbf{ab}\right)\quad\mathbf{ap}\cdot\left(\mathbf{ab}\times\mathbf{ac}\right)\right]}{\mathbf{ab}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)},
\end{equation}
公式\eqref{eq:global to barycentric}的四个组成成分其实就是上面的公式\eqref{eq:lambda1},\eqref{eq:lambda2},\eqref{eq:lambda3},\eqref{eq:lambda4}。$\rm{det}\mathbf{A}$是矩阵$\mathbf{A}$的行列式,表示为$\mathbf{ab}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)$。
至此,barycentric coordinates与global coordinates的正向变换和逆向变化都已经定义完成了,上面的分析是基于我看OF6的代码以及查阅相关的文献总结出来的。
但是有一个问题困扰了我很久了 ,那就是逆向变换矩阵的第一个元素是:
,那就是逆向变换矩阵的第一个元素是:
\begin{equation}
\label{eq:the first element of T}
\boldsymbol{\lambda}_1=\frac{\mathbf{ap}\cdot\left(\mathbf{bd}\times\mathbf{bc}\right)}{\mathbf{ab}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)},
\end{equation}
这个和公式\eqref{eq:lambda1}的定义不同,因为分子上算的不是图中小四面体pbcd的体积,就这儿我无法理解为什么OF里要这么定义,并且我看OF5-OF8里面都是这么定义的,我觉得有点问题,所有发出来和大家讨论一下,我觉得我自己是解决不了这个问题了
-
首先跟随你的思想:按照理论,应该是:
\begin{equation}
\boldsymbol{\lambda}=\frac{\mathbf{ap}\cdot\mathbf{T}}{\rm{det}\mathbf{A}}=\frac{\left[\mathbf{bp}\cdot\left(\mathbf{bd}\times\mathbf{bc}\right)\quad\mathbf{ap}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)\quad\mathbf{ap}\cdot\left(\mathbf{ad}\times\mathbf{ab}\right)\quad\mathbf{ap}\cdot\left(\mathbf{ab}\times\mathbf{ac}\right)\right]}{\mathbf{ab}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)},
\end{equation}
同时
\begin{equation}
\mathbf{bp}\neq\mathbf{ap}
\end{equation}
所以代码跟理论对不上? -
仔细读了代码,现在还剩最后一点小问题,其实说到底还是原来的问题,barycentric追踪是通过bary displacement元素的正负来判断颗粒运动轨迹与四面体网格面的交点的,例如这个图形
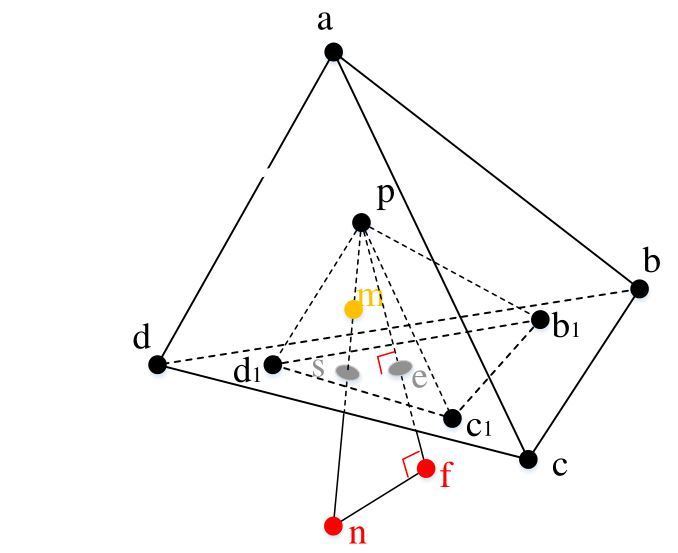
颗粒$\mathbf{p}$运动到$\mathbf{n}$,轨迹$\mathbf{pn}$与面$\underline{\rm{bcd}}$相交于点$\mathbf{s}$,那么矢量$\mathbf{pn}$的barycentric displacement的计算方法为:
\begin{equation}
\begin{aligned}
\label{eq:barycentric displacement}
\boldsymbol{\lambda}_{\mathbf{p}\rightarrow\mathbf{n}}
&=\boldsymbol{\lambda}\left(\mathbf{n}\right)-\boldsymbol{\lambda}\left(\mathbf{p}\right)=\frac{\mathbf{an}\cdot\mathbf{T}}{\rm{det}\mathbf{A}}-\frac{\mathbf{ap}\cdot\mathbf{T}}{\rm{det}\mathbf{A}}=\frac{\mathbf{pn}\cdot\mathbf{T}}{\rm{det}\mathbf{A}}\
&=\frac{\left[\mathbf{pn}\cdot\left(\mathbf{bd}\times\mathbf{bc}\right)\quad\mathbf{pn}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)\quad\mathbf{pn}\cdot\left(\mathbf{ad}\times\mathbf{ab}\right)\quad\mathbf{pn}\cdot\left(\mathbf{ab}\times\mathbf{ac}\right)\right]}{\mathbf{ab}\cdot\left(\mathbf{ac}\times\mathbf{ad}\right)};.
\end{aligned}
\end{equation}
此时barycentric dispalcement的符号为(-,+++),可以判断轨迹与面$\underline{\rm{bcd}}$相交,同根根据$\mathbf{p}$和$\mathbf{n}$的barycentric coordinates可以求出点$\mathbf{s}$的barycentric coordinates,再转换为点$\mathbf{s}的$gobal coordinates,然后进如下一个四面体网格追踪。
上面我只是简述了颗粒在一个四面体网格内的追踪过程,从计算barycentric dispalcement的角度来看,逆向变换矩阵$\mathbf{T}$是没有问题的,但是问题还是在于从barycentric coordinates to global coordinates的过程,矩阵$\mathbf{T}$的第一个元素有问题。如果把\ref{eq: the first element of T}变为$\boldsymbol\lambda_1=1-\boldsymbol\lambda_2-\boldsymbol\lambda_3-\boldsymbol\lambda_4$就好了,但是程序里没有这么写,说到底还是原来的问题 如果李老师有时间的话可不可以读一下particle类,我觉得您可以帮我释疑
如果李老师有时间的话可不可以读一下particle类,我觉得您可以帮我释疑
-
-
@BlookCFD 谢谢您的指点,我有看了一眼程序,我理解错了,OF里面是通过计算barycentric displacement来获得barycentric coordinates的,我一直被src/lagrangian/basic/particle/particle.C里面的一句代码给误导了,现贴出来:
particle.C 1062-1096 OpenFOAM6 void Foam::particle::correctAfterInteractionListReferral(const label celli) { // Get the position from the barycentric data const vector pos(coordinates_.b(), coordinates_.c(), coordinates_.d()); // Create some arbitrary topology for the supplied cell celli_ = celli; tetFacei_ = mesh_.cells()[celli_][0]; tetPti_ = 1; facei_ = -1; // Get the reverse transform and directly set the coordinates from the // position. This isn't likely to be correct; the particle is probably not // in this tet. It will, however, generate the correct vector when the // position method is called. A referred particle should never be tracked, // so this approximate topology is good enough. By using the nearby cell we // minimize the error associated with the incorrect topology. coordinates_ = barycentric(1, 0, 0, 0); if (mesh_.moving()) { Pair<vector> centre; FixedList<scalar, 4> detA; FixedList<barycentricTensor, 3> T; movingTetReverseTransform(0, centre, detA, T); coordinates_ += (pos - centre[0]) & T[0]/detA[0]; } else { vector centre; scalar detA; barycentricTensor T; stationaryTetReverseTransform(centre, detA, T); coordinates_ += (pos - centre) & T/detA; } }其中的这句代码
coordinates_ += (pos - centre) & T/detA;其实前面已经先定义了
coordinates_ = barycentric(1, 0, 0, 0);后面计算单点的barycentric coordinates其实还是用的barycentric displacement的概念来转换的。
困扰了我两周的问题终于解决了,现在异常开心,在此对@东岳 和@BlookCFD 表示万分感谢。
