地形网格cfmesh一键生成真的很方便,我前段时间做大尺度地形界面泥石流模拟,用这个真的省了不少事儿。
上级
@上级
帖子
-
求教边界层生成问题 -
OPENFoam里有没有颗粒的全解析求解器 -
流化床床层高度 -
OpenFOAM有对单个固体颗粒在流场中的全解析计算的求解器吗 -
基于扩散的方法解决粒子大于网格 -
基于扩散的方法解决粒子大于网格@杨英狄 这个在肖恒老师的两篇文章详细讨论过吧,算是一种经典的处理粗颗粒的办法:
1:Diffusion-based coarse graining in hybrid continuum–discrete solvers: Theoretical formulation and a priori tests
2:Diffusion-based coarse graining in hybrid continuum–discrete solvers: Applications in CFD–DEM
然后也有很多这个方法的变种(基于OpenFOAM或者CFDEM)
1:An optimized Eulerian–Lagrangian method for two-phase flow with coarse particles: Implementation in open-source field operation and manipulation, verification, and validation
2: A semi-resolved CFD-DEM approach for particulate flows with kernel based approximation and Hilbert curve based searching strategy -
壁面侵蚀边界的实现方法 -
壁面侵蚀边界的实现方法目前正在用OpenFOAM做坡面泥石流相关的数值模拟,主要是基于InterMixingFoam求解器(interFoam的衍生),将泥石流看作两相流体的混合物(颗粒与水),然后气相用来捕捉泥石流混合物运动过程的自由面。这是大致的示意图。
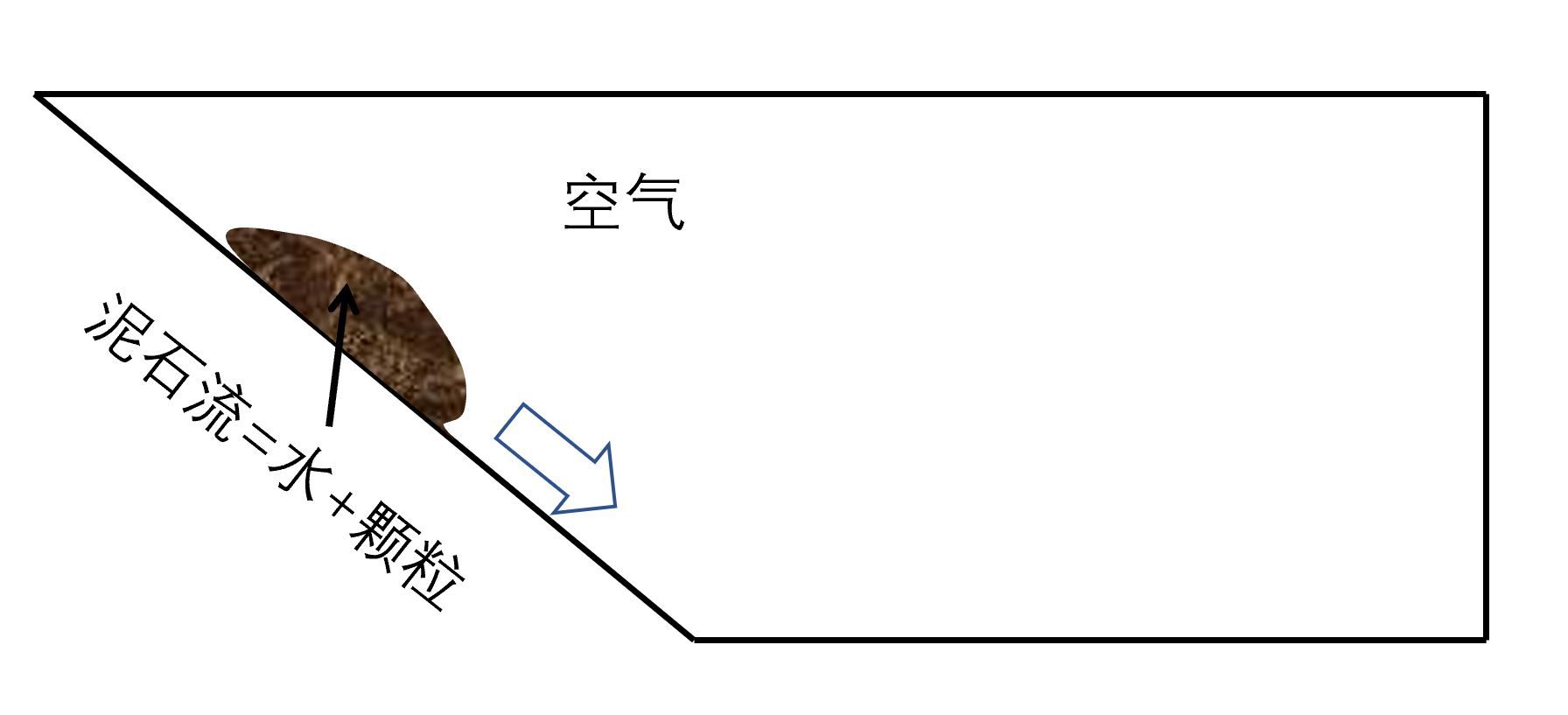
前期修改求解器实现了泥石流内部两相的相互作用(考虑速度滑移,interFoam本身未考虑速度滑移),预测了现场泥石流的运动过程,这是计算的几何域和计算的泥石流运动的速度云图。
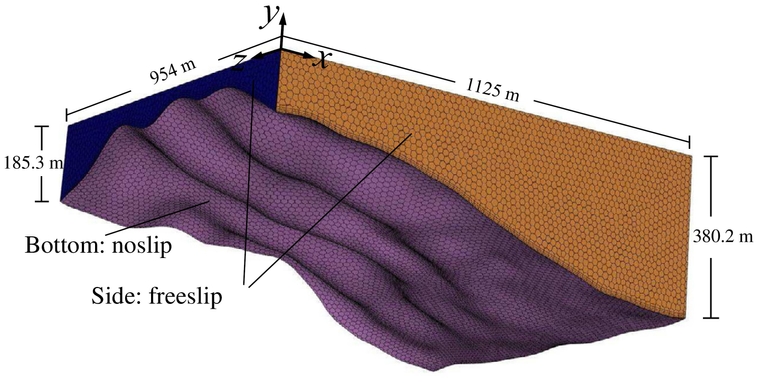
图二 计算几何域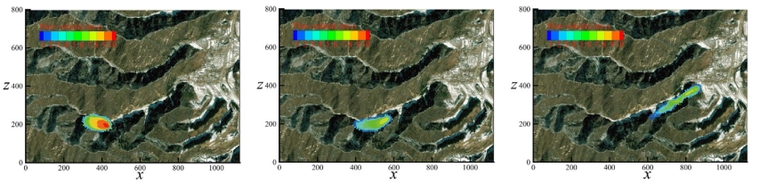
图三 泥石流运动速度云图现在想要进一步延申。之前是直接将底部边界设置为noSlip边界,但是泥石流沿着坡面向下运动时会携带破面的物质向下走,导致泥石流相的体积会越来越大,文献中叫“坡面侵蚀”,想在数值上实现这个过程,我理解来看应该是下壁面上的一种边界条件,但是因为没有接触过类似的问题,现在不知道该用什么边界条件。
所以把问题发出来想咨询一下有没有研究类似问题或者类似过程的大佬可以给指个方向

-
OpenFOAM编程findCell的诡异问题,对同一坐标寻找cell结果不一致@oitocfd 之前写过一个小函数,具体是在dpmfoam里用到的,是寻找一个颗粒所在的cell label以及这个cell周围的一圈cell label,不知道能不能帮到你。
template<class Type> const Foam::labelList& Foam::interpolationCellAround<Type>::cellpointCells ( const label celli, DynamicList<label>& storage ) const { const labelList& cPoints = this->psi_.mesh().cellPoints()[celli]; storage.clear(); forAll(cPoints, i) { const label pointi = cPoints[i]; const labelList& pointcellsi = this->psi_.mesh().pointCells()[pointi]; forAll(pointcellsi, j) { storage.append(pointcellsi[j]); } } // Filter duplicates if (storage.size() > 1) { sort(storage); label n = 1; for (label i = 1; i < storage.size(); i++) { if (storage[i-1] != storage[i]) { storage[n++] = storage[i]; } } // truncate addressed list storage.setSize(n); } return storage; } template<class Type> const Foam::labelList& Foam::interpolationCellAround<Type>::cellpointCells(const label celli) const { return cellpointCells(celli, labels_); }interpolationCellAround是自定义的类,主要是函数的实现。
-
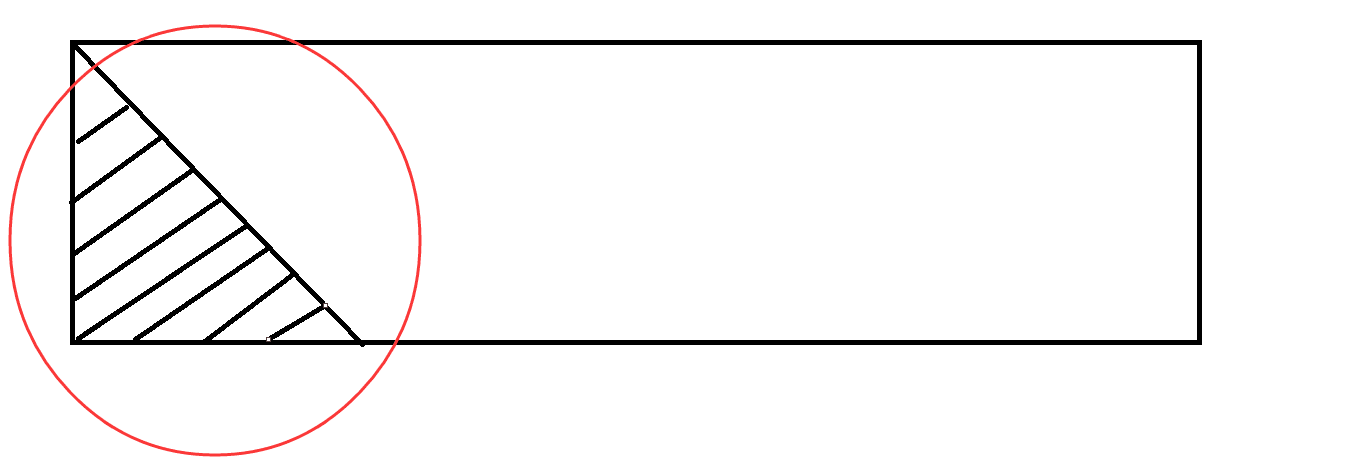
topoSet初始能否框出一个三角形区域呢? -
topoSet初始能否框出一个三角形区域呢?计算滑块入水问题,初始想在计算域框选出一个三角形区域,不知道能否实现?
-
DPMFoam算流化床压降波动过于剧烈 -
DPMFoam算流化床压降波动过于剧烈想问作者一个问题,请问是如何在paraview里面把颗粒上色,显示不同的速度的大小的呢。
此外,是否压力本来就该取平均值,在controlDict里面添加平均库函数来获得平均场,在这里贴上我的用过的例子:functions { fieldAverage { type fieldAverage; libs ("libfieldFunctionObjects.so"); writeControl writeTime; timeStart 1; fields ( UField { mean on; prime2Mean on; base time; } alpha { mean on; prime2Mean on; base time; } alpha.air { mean on; prime2Mean on; base time; } U.air { mean on; prime2Mean on; base time; } ); } } -
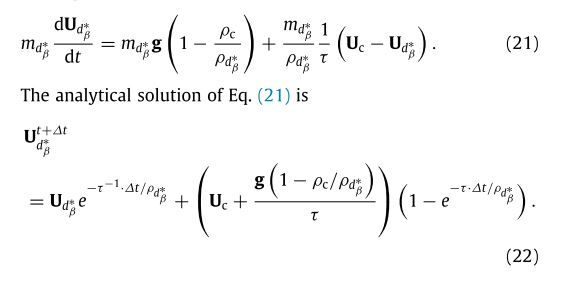
OF5版本以后重心坐标与绝对坐标的相互转换的问题。@BlookCFD 谢谢您的指点,我有看了一眼程序,我理解错了,OF里面是通过计算barycentric displacement来获得barycentric coordinates的,我一直被src/lagrangian/basic/particle/particle.C里面的一句代码给误导了,现贴出来:
particle.C 1062-1096 OpenFOAM6 void Foam::particle::correctAfterInteractionListReferral(const label celli) { // Get the position from the barycentric data const vector pos(coordinates_.b(), coordinates_.c(), coordinates_.d()); // Create some arbitrary topology for the supplied cell celli_ = celli; tetFacei_ = mesh_.cells()[celli_][0]; tetPti_ = 1; facei_ = -1; // Get the reverse transform and directly set the coordinates from the // position. This isn't likely to be correct; the particle is probably not // in this tet. It will, however, generate the correct vector when the // position method is called. A referred particle should never be tracked, // so this approximate topology is good enough. By using the nearby cell we // minimize the error associated with the incorrect topology. coordinates_ = barycentric(1, 0, 0, 0); if (mesh_.moving()) { Pair<vector> centre; FixedList<scalar, 4> detA; FixedList<barycentricTensor, 3> T; movingTetReverseTransform(0, centre, detA, T); coordinates_ += (pos - centre[0]) & T[0]/detA[0]; } else { vector centre; scalar detA; barycentricTensor T; stationaryTetReverseTransform(centre, detA, T); coordinates_ += (pos - centre) & T/detA; } }其中的这句代码
coordinates_ += (pos - centre) & T/detA;其实前面已经先定义了
coordinates_ = barycentric(1, 0, 0, 0);后面计算单点的barycentric coordinates其实还是用的barycentric displacement的概念来转换的。
困扰了我两周的问题终于解决了,现在异常开心,在此对@东岳 和@BlookCFD 表示万分感谢。

{kind=link}