如果有结构物造成的网格畸变,建议更换为overset。
L
lizhisongsjtu
@lizhisongsjtu
帖子
-
关于wave2foam造波问题 -
几何VOF方法扩展包geometricVofExt发布安装
geometricVofExt,遇到CGAL的链接和指向问题。问题语句为
include $(GENERAL_RULES)/CGAL请大佬指点一下,如何解决?!
安装过程如下:
CGAL安装
安装后,检查是否安装成功:
****************************** Check CGAL ****************************** cgal=true flavour=library root="/home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3" include="/home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/include" library="/home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/lib64" ********************************* Done *********************************其中,ABCD表示
home目录。src/CGALVof目录编译: 使用原始的options文件
无法编译
libCGALVof.so>> wmake libso CGALVof make: *** /home/ABCD/OpenFOAM/OpenFOAM-v2506/wmake/rules/General/CGAL: Is a directory. Stop. make: *** /home/ABCD/OpenFOAM/OpenFOAM-v2506/wmake/rules/General/CGAL: Is a directory. Stop. wmake error: file 'Make/linux64GccDPInt32Opt/sourceFiles' could not be created in /home/ABCD/OpenFOAM/ABCD-v2506/modules/geometricVofExt/src/CGALVof其中,原始
options文件为CGAL_EXACT = /*-DCGAL_DONT_USE_LAZY_KERNEL*/ CGAL_INEXACT = -DCGAL_INEXACT include $(GENERAL_RULES)/CGAL c++CGALWARN = -Wno-old-style-cast EXE_INC = \ -I$(LIB_SRC)/finiteVolume/lnInclude \ -I$(LIB_SRC)/fileFormats/lnInclude \ -I$(LIB_SRC)/surfMesh/lnInclude \ -I$(LIB_SRC)/dynamicFvMesh/lnInclude \ -I$(LIB_SRC)/meshTools/lnInclude \ -I$(LIB_SRC)/surfMesh/lnInclude \ -ICGALVof/lnInclude \ ${CGAL_EXACT} \ ${CGAL_INEXACT} \ ${CGAL_INC} \ ${c++CGALWARN} \ -fopenmp \ -frounding-math EXE_LIBS = \ ${CGAL_LIBS} \ -lfiniteVolume \ -lfileFormats \ -lsurfMesh \ -ldynamicFvMesh \ -lmeshTools**根据错误提示,定位问题出在语句
include $(GENERAL_RULES)/CGAL**.src/CGALVof目录编译: 编译前导入环境变量
注释
options文件中的语句/*include $(GENERAL_RULES)/CGAL*/**.编译前导入的环境变量为
#!/bin/bash export CGAL_INC=-I${WM_THIRD_PARTY_DIR}/platforms/linux64Gcc/CGAL-4.14.3/include export CGAL_LIBS=-L${WM_THIRD_PARTY_DIR}/platforms/linux64Gcc/CGAL-4.14.3/lib64编译命令为
source bashrc # bashrc 文件即为导入的环境变量 wclean wmake成功编译出
libCGALVof.soapplications/utilities/setVofField编译
根据第 3 步的经验,注释
options文件中的语句/*include $(GENERAL_RULES)/CGAL*/**.编译结果为
Making dependencies: setVofField.C g++ -std=c++17 -m64 -pthread -DOPENFOAM=2506 -DWM_DP -DWM_LABEL_SIZE=32 -Wall -Wextra -Wold-style-cast -Wnon-virtual-dtor -Wno-unused-parameter -Wno-invalid-offsetof -Wno-attributes -Wno-unknown-pragmas -O3 -DNoRepository -ftemplate-depth-100 -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/finiteVolume/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/fileFormats/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/surfMesh/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/dynamicFvMesh/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/dynamicMesh/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/overset/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/meshTools/lnInclude -I/home/ABCD/OpenFOAM/ABCD-v2506/modules/geometricVofExt/src/CGALVof/lnInclude -I/home/ABCD/OpenFOAM/ABCD-v2506/modules/geometricVofExt/src/SimPLIC/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/phaseSystemModels/twoPhaseInter/incompressibleInterPhaseTransportModel/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/sampling/lnInclude -DCGAL_INEXACT -I/home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/include -Wno-old-style-cast -fopenmp -frounding-math -iquote. -IlnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/OpenFOAM/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/OSspecific/POSIX/lnInclude -fPIC -c setVofField.C -o Make/linux64GccDPInt32Opt/setVofField.o In file included from /usr/include/boost/type_index.hpp:25, from /usr/include/boost/variant/variant.hpp:21, from /usr/include/boost/variant.hpp:17, from /home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/include/CGAL/Object.h:38, from /home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/include/CGAL/kernel_basic.h:34, from /home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/include/CGAL/basic.h:47, from /home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/include/CGAL/Cartesian/Cartesian_base.h:29, from /home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/include/CGAL/Simple_cartesian.h:29, from /home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/include/CGAL/Exact_predicates_inexact_constructions_kernel.h:29, from /home/ABCD/OpenFOAM/ABCD-v2506/modules/geometricVofExt/src/CGALVof/lnInclude/CGALKernel.H:55, from /home/ABCD/OpenFOAM/ABCD-v2506/modules/geometricVofExt/src/CGALVof/lnInclude/CGALSurfaceMesh.H:41, from setVofField.C:36: /usr/include/boost/function_output_iterator.hpp:14:1: note: ‘#pragma message: This header is deprecated. Use <boost/iterator/function_output_iterator.hpp> instead.’ 14 | BOOST_HEADER_DEPRECATED("<boost/iterator/function_output_iterator.hpp>") | ^~~~~~~~~~~~~~~~~~~~~~~ /usr/include/boost/bind.hpp:36:1: note: ‘#pragma message: The practice of declaring the Bind placeholders (_1, _2, ...) in the global namespace is deprecated. Please use <boost/bind/bind.hpp> + using namespace boost::placeholders, or define BOOST_BIND_GLOBAL_PLACEHOLDERS to retain the current behavior.’ 36 | BOOST_PRAGMA_MESSAGE( | ^~~~~~~~~~~~~~~~~~~~ In file included from setVofField.C:43: /home/ABCD/OpenFOAM/ABCD-v2506/modules/geometricVofExt/src/SimPLIC/lnInclude/reconstruction.H:318:13: warning: type qualifiers ignored on function return type [-Wignored-qualifiers] 318 | const bool willMapAlphaField() const | ^~~~~ In file included from setVofField.C:98: setAlphaField.H: In function ‘int main(int, char**)’: setAlphaField.H:32:35: warning: unused variable ‘aridCells’ [-Wunused-variable] 32 | const DynamicList<label>& aridCells(cellLocs.aridCells()); | ^~~~~~~~~ In file included from setVofField.C:136: setAlphaField.H:32:35: warning: unused variable ‘aridCells’ [-Wunused-variable] 32 | const DynamicList<label>& aridCells(cellLocs.aridCells()); | ^~~~~~~~~ g++ -std=c++17 -m64 -pthread -DOPENFOAM=2506 -DWM_DP -DWM_LABEL_SIZE=32 -Wall -Wextra -Wold-style-cast -Wnon-virtual-dtor -Wno-unused-parameter -Wno-invalid-offsetof -Wno-attributes -Wno-unknown-pragmas -O3 -DNoRepository -ftemplate-depth-100 -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/finiteVolume/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/fileFormats/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/surfMesh/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/dynamicFvMesh/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/dynamicMesh/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/overset/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/meshTools/lnInclude -I/home/ABCD/OpenFOAM/ABCD-v2506/modules/geometricVofExt/src/CGALVof/lnInclude -I/home/ABCD/OpenFOAM/ABCD-v2506/modules/geometricVofExt/src/SimPLIC/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/phaseSystemModels/twoPhaseInter/incompressibleInterPhaseTransportModel/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/sampling/lnInclude -DCGAL_INEXACT -I/home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/include -Wno-old-style-cast -fopenmp -frounding-math -iquote. -IlnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/OpenFOAM/lnInclude -I/home/ABCD/OpenFOAM/OpenFOAM-v2506/src/OSspecific/POSIX/lnInclude -fPIC -Xlinker --add-needed -Xlinker --no-as-needed Make/linux64GccDPInt32Opt/setVofField.o -L/home/ABCD/OpenFOAM/OpenFOAM-v2506/platforms/linux64GccDPInt32Opt/lib \ -L/home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib -L/home/ABCD/OpenFOAM/ThirdParty-v2506/platforms/linux64Gcc/CGAL-4.14.3/lib64 -lfiniteVolume -lfileFormats -lsurfMesh -ldynamicFvMesh -loverset -lmeshTools -lwaveModels -lCGALVof -lSimPLIC -limmiscibleIncompressibleTwoPhaseMixture -lsampling -lOpenFOAM -ldl \ -lm -o /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/bin/setVofField /usr/bin/ld: Make/linux64GccDPInt32Opt/setVofField.o: in function `CGAL::Interval_nt<false>::Test_runtime_rounding_modes::Test_runtime_rounding_modes()': setVofField.C:(.text._ZN4CGAL11Interval_ntILb0EE27Test_runtime_rounding_modesC2Ev[_ZN4CGAL11Interval_ntILb0EE27Test_runtime_rounding_modesC5Ev]+0xc9): undefined reference to `CGAL::assertion_fail(char const*, char const*, int, char const*)' /usr/bin/ld: setVofField.C:(.text._ZN4CGAL11Interval_ntILb0EE27Test_runtime_rounding_modesC2Ev[_ZN4CGAL11Interval_ntILb0EE27Test_runtime_rounding_modesC5Ev]+0xe8): undefined reference to `CGAL::assertion_fail(char const*, char const*, int, char const*)' /usr/bin/ld: Make/linux64GccDPInt32Opt/setVofField.o: in function `CGAL::Interval_nt<true>::Test_runtime_rounding_modes::Test_runtime_rounding_modes()': setVofField.C:(.text._ZN4CGAL11Interval_ntILb1EE27Test_runtime_rounding_modesC2Ev[_ZN4CGAL11Interval_ntILb1EE27Test_runtime_rounding_modesC5Ev]+0xc9): undefined reference to `CGAL::assertion_fail(char const*, char const*, int, char const*)' /usr/bin/ld: setVofField.C:(.text._ZN4CGAL11Interval_ntILb1EE27Test_runtime_rounding_modesC2Ev[_ZN4CGAL11Interval_ntILb1EE27Test_runtime_rounding_modesC5Ev]+0xe8): undefined reference to `CGAL::assertion_fail(char const*, char const*, int, char const*)' /usr/bin/ld: Make/linux64GccDPInt32Opt/setVofField.o: in function `_GLOBAL__sub_I_setVofField.C': setVofField.C:(.text.startup+0x2e6): undefined reference to `CGAL::Random::Random()' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `mpfr_get_emin' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpn_com' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpq_swap' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpq_init' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `CGAL::precondition_fail(char const*, char const*, int, char const*)' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpn_copyi' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpq_cmp' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `mpfr_set_q' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `CGAL::postcondition_fail(char const*, char const*, int, char const*)' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpn_add_n' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpq_set_d' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `mpfr_get_d' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpq_sub' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpz_init_set_ui' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpq_clear' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpn_sqr' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `mpfr_set_emin' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpn_sub_n' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpq_mul' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpq_div' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `CGAL::Random::Random(unsigned int)' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpz_init_set_si' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `mpfr_subnormalize' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpq_set' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpn_mul' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `CGAL::warning_fail(char const*, char const*, int, char const*)' /usr/bin/ld: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/lib/libCGALVof.so: undefined reference to `__gmpq_add' collect2: error: ld returned 1 exit status make: *** [/home/ABCD/OpenFOAM/OpenFOAM-v2506/wmake/makefiles/general:182: /home/ABCD/OpenFOAM/ABCD-v2506/platforms/linux64GccDPInt32Opt/bin/setVofField] Error 1setShapedFields的编译错误与上面的类似。 -
waves2Foam的一键安装解决方案完整的ThirdParty还要从http://svn.code.sf.net/p/openfoam-extend/svn/trunk/Breeder_1.6/other/waves2Foam下载。
这是是提供了一个修改了的ThirdParty/settings文件,用来替换waves2Foam中的settings文件。
-
Openfoam1912编译waves2Foam失败,求教 -
overset mesh 两个自由下落的小球如何分别设置运动参数计算两个并排的小球在水中下降,关注两个小球的中心位置变化。物理原型为船舶紧急抛双锚。
目前在of2206中设置了两个小球,但设置sixDoFRigidBodyMotion时,发现貌似不支持为每个球单独设置运动参数。比如两个球大小、密度不一。
上传算例,哪位能帮助看看如何解决?falling.SphereTwoNew.zip

-
sampling沿直线取数据,发现个别位置的数据有缺失统一回复一下:
感谢给的热心解答。
用线提取密度的垂向变化(内波),表面波的probe暂时不适用这个问题。
有效解决方案:
方案A:用toposet选取一定区域的网格,输出rho,这就有了xyzrho的数据。然后根据需要的xz坐标,做插值即可。
方案B:选取全局的网格,输出cuttingPlane上的数据。
方案C:输出特定等直面的数据。方案A灵活,但操作复杂;方案B数据最全,但存储空间比较大;方案C直接,对三维工况不友好。
这都是后处理的技巧,能获得需要的数据。
-
sampling沿直线取数据,发现个别位置的数据有缺失网格用blockMesh生成,纯流体,没有结构物。
对沿线分布数据的时间分辨率要求很高,如果用paraview中导出线上的数据,时间上的分辨率不够。
也许,用topoSet选取局部网格,大概也可以 -
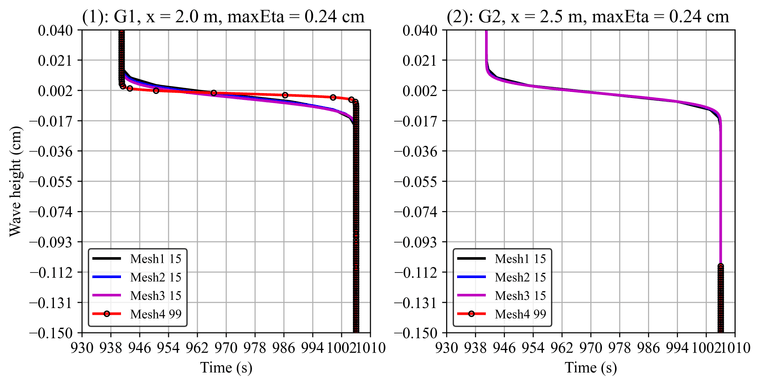
sampling沿直线取数据,发现个别位置的数据有缺失这是其中的两个位置的垂向分布。在Mesh4中,第二个位置的数据就出现了缺损。目前搞不清楚怎么回事。这块数据缺失,很影响对计算结果的解读。
-
sampling沿直线取数据,发现个别位置的数据有缺失对某溃坝算力,用sampling沿垂向取密度,获取自由面的位置。
在做网格独立性验证时,突然发现某些位置的数据,存在数据异常,甚至数据缺失。
目前已经采取的改进措施:(1) 改变并行方法 (2)略微修改x坐标
这两个方法都没有效果。
哪位遇到过类似的问题,如何解决?
Lines { type sets; libs (sampling); enabled true; writeControl adjustableRunTime; writeInterval 0.01; interpolationScheme cellPoint; setFormat raw; fixedLocations false; fields ( rho ); sets ( line01 { type uniform; axis xyz; start (2.002 0 -0.24); end (2.002 0 0.04); nPoints 1000; } line02 { type uniform; axis xyz; start (2.502 0 -0.24); end (2.502 0 0.04); nPoints 1000; } line03 { type uniform; axis xyz; start (3.002 0 -0.24); end (3.002 0 0.04); nPoints 1000; } line04 { type uniform; axis xyz; start (3.502 0 -0.24); end (3.502 0 0.04); nPoints 1000; } line05 { type uniform; axis xyz; start (4.0 0 -0.24); end (4.0 0 0.04); nPoints 1000; } line06 { type uniform; axis xyz; start (4.5 0 -0.24); end (4.5 0 0.04); nPoints 1000; } line07 { type uniform; axis xyz; start (4.65 0 -0.24); end (4.65 0 0.04); nPoints 1000; } ); } -
从湍流模型的correct函数中,输出浮力项、流线弯曲修正项等可能是版本不同的问题,在OF2206中,添加缓存没有成功。

用另一种方法,算是曲线完成任务了。
在H文件中,添加
volScalarField NN;,在C文件初始化的列表中,加入NN ( IOobject ( "NN", this->runTime_.timeName(), this->mesh_, IOobject::NO_READ, IOobject::AUTO_WRITE ), this->mesh_ ),然后在恰当的位置,完成赋值
NN = N2即可。不过有一个缺陷,需要再初始文件夹中设定
NN的初始文件。(先解决问题,麻烦就麻烦点吧)
-
从湍流模型的correct函数中,输出浮力项、流线弯曲修正项等对SST湍流模型作修正,引入了浮力项N2和流线弯曲修正项Fr1。希望在输出k、omega的时候,同步输出N2和Fr1.请问要怎么写?
尝试了
N2.write();,这个语句把每个dt的结果全都输出了。请问要怎么改写?
// Calculate the Brunt-Vaisala frequency volScalarField N2 = gField_&fvc::grad(rho1)/rho1; N2.write(); // this exports data every time setp. //curvature correction const scalar cr1_ = 1.0; const scalar cr2_ = 2.0; const scalar cr3_ = 1.0; volScalarField Fr1 ( max ( min ( (scalar(1.0) + cr1_)*2.0*rStar / (scalar(1)+rStar) * (scalar(1.0) - cr3_*atan(cr2_*rTilda))- cr1_ , scalar(1.25) ) , scalar(0.0) ) ); // Turbulent kinetic energy equation tmp<fvScalarMatrix> kEqn ( fvm::ddt(alpha, rho1, k_) + fvm::div(rhoPhi, k_) - fvm::laplacian(alpha*rho1*DkEff(F1), k_) == alpha()*rho1()*Pk(G) * Fr1() // curvature correction - fvm::SuSp((2.0/3.0)*alpha()*rho1()*divU, k_) - fvm::Sp(alpha()*rho1()*epsilonByk(F1, F23), k_) - fvm::Sp(nut*alphaBS_*N2*rho1/max(k_,this->kMin_),k_) // Buoyancy production term + rho1*kSource() + fvOptions(alpha, rho1, k_) ); -
设置vectorCodedSource类型源项,源项量纲和程序量纲不匹配!解决方案:
-
在of8及同系列版本中,单相流和多相流均使用codeAddSup定义源项。
-
在of2206及同系列版本中,单相流使用codeAddSup定义源项,多相流使用codeAddSupRho定义源项。
-
-
设置vectorCodedSource类型源项,源项量纲和程序量纲不匹配!@李东岳 我想确认一下,7楼的代码真的在2206上运行成功了吗?谢谢
附:of2206、of8和of12的日志。of2206失败。of8直接可以用7楼的代码,of12需放入fvModels中并略作修改。
-
设置vectorCodedSource类型源项,源项量纲和程序量纲不匹配!感谢回复解惑。
1楼、2楼和4楼,即代码和算例,是在of2206上测试的,失败。
下面的一段代码,在of2206上仍然失败。在of8上暂时可以运行,源项效果有待检验。此上!
codedSource { type vectorCodedSource; name sourceTime; selectionMode cellSet; cellSet myUSourceCellsZoneSet; fields ( U ); codeAddSup #{ const vectorField& C = mesh_.C(); const scalarField& V = mesh_.V(); vectorField& Usource = eqn.source(); forAll(C, i) { // Info << "cellI = " << i << nl; const scalar y = C[i][0]; const scalar vol = V[i]; const scalar fx = vol * 1.0; Usource[i] -= vector(1.0, 0, 0); } Info << "***codeAddSup***" << nl; #}; codeConstrain #{ #}; codeCorrect #{ #}; } -
设置vectorCodedSource类型源项,源项量纲和程序量纲不匹配!上传一下case文件
-
设置vectorCodedSource类型源项,源项量纲和程序量纲不匹配!addSup的构造函数
//- Explicit/implicit matrix contributions virtual void addSup ( fvMatrix<Type>& eqn, const label fieldi ); //- Explicit/implicit matrix contributions to compressible equation virtual void addSup ( const volScalarField& rho, fvMatrix<Type>& eqn, const label fieldi ); -
设置vectorCodedSource类型源项,源项量纲和程序量纲不匹配!用interFoam计算两相流,在计算域内选择一块区域作为源区域,施加动量源项。
在 system/fvOptions 中添加了 vectorCodedSource类型的源项,并参考了 网站链接 的方法设置了源项。根据报错信息,初步确定是添加源项的量纲出了问题。请高手指点,如何解决这个问题
最核心的一句报错信息是
--> FOAM FATAL ERROR: (openfoam-2206) Not implemented From virtual void Foam::fv::codedMomentumSourceFvOptionvectorSource::addSup(const volScalarField&, Foam::fvMatrix<Foam::Vector<double> >&, Foam::label)附fvOptions代码
codedSource { type vectorCodedSource; active true; name codedMomentumSource; // selectionMode all; selectionMode cellSet; cellSet myUSourceCellsSet; // 可以用 topoSet 定义的 cellSet fields ( U ); codeAddSup #{ // https://www.cfd-china.com/topic/3255/%E5%88%86%E5%8C%BA%E7%BD%91%E6%A0%BC%E7%9A%84%E4%B8%80%E5%B0%8F%E6%AE%B5%E4%BB%A3%E7%A0%81?_=1731583465684 Info << "++++From codedSource in fvOptions" << nl; const label cellZoneID = mesh().cellZones().findZoneID("myUSourceCellsSet"); // find ID for the cellZone "BANANA" const cellZone& zone = mesh().cellZones()[cellZoneID]; const cellZoneMesh& zoneMesh = zone.zoneMesh(); const labelList& cellsZone = zoneMesh[cellZoneID]; //list of all cellZone cell ID's const Time& time = mesh().time(); const scalarField& V = mesh_.V(); // Cell volume Foam::Field<Foam::Vector<double> >& USource = eqn.source(); // get source from fvMatrix //scalarField & Udiag = eqn.diag(); // get diagonal of fvMatrix const scalarField& rho = mesh().lookupObject<scalarField>("rho"); // get density field const vector g (0, 0, -9.81); // gravitational vector forAll(cellsZone,i) { const label celli = cellsZone[i]; // USource[celli] -= rho[celli]*g/V[celli] * sin(time.value()); USource[celli] = sin(time.value()); } #}; // chatGPT 的解决方案 + CFD-online解决方案 // codeAddSup // #{ // Info << "++++From codedSource in fvOptions" << nl; // const scalarField& V = mesh_.V(); // vectorField& USource = eqn.source(); // const scalarField& cellx = mesh_.C().component(0) ; // const scalarField& celly = mesh_.C().component(1) ; // forAll(USource, cellI) // { // Info << "cellI = " << cellI << nl; // // scalar v1 = 512*( 2*pow(cellx[i],6) - 6*pow(cellx[i],5) + 7*pow(cellx[i],4) // // - 4*pow(cellx[i],3) + pow(cellx[i],2))*pow(celly[i],7) ; // // // .... and the other 9 scalars // // // Please ADD to the source, don't overwrite it. // // // Overwriting it means you don't care about source terms in // // // DESCRETISATION OPERATORS (laplacian, div ...) // USource[cellI][0] += 1.0 * USource[cellI][1]; // } // #}; codeInclude #{ #include "fvCFD.H" #}; codeCorrect #{ // Use Correct to make adjustments to the U values after they get calculated Info << "++++codeCorrect" << nl; #}; codeConstrain #{ // Use Constrain to modify the U equation before it gets solved Info << "++++codeConstrain" << nl; #}; } -
请教:第三代涡识别方法Liutex的代码在linux中运行的问题 -
waves2Foam的一键安装解决方案@队长别开枪 高手。膜拜。
-
waves2Foam的一键安装解决方案waves2Foam是海岸工程研究中非常常用的造波模块。安装waves2Foam经常遇到版本匹配和编译错误。这里提供一个新的解决方案,用户可一键安装解决。
解决方案 可从本人github中下载,地址是 https://github.com/zhisongli/publicData,文件名是 waves2Foam2156-of2206-github.zip。
关于openfoam和waves2Foam匹配方案,推荐openfoam2206和waves2Foam2156。
编译错误多来自于Fortran程序中,实参和形参的类型不匹配,也有来自程序语句过长。
此处提供一个新的ThirdParty/settings,用户可一键安装。一键安装脚本
# install necessary packages sudo apt-get install libgsl-dev sudo apt install subversion # download OceanWave3D-Fortran90 and move it to ThirdParty git clone https://github.com/boTerpPaulsen/OceanWave3D-Fortran90.git cp -r OceanWave3D-Fortran90 ThirdParty/OceanWave3D-Fortran90BK # download waves2Foam svn co http://svn.code.sf.net/p/openfoam-extend/svn/trunk/Breeder_1.6/other/waves2Foam # go to waves2Foam and copy my Thirdparty. cd waves2Foam rm -rf ThirdParty cp -f ../ThirdParty . cd .. # move waves2Foam to $WM_PROJECT_USER_DIR/applications/utilities/ mkdir -p $WM_PROJECT_USER_DIR/applications/utilities/ cp -r waves2Foam $WM_PROJECT_USER_DIR/applications/utilities/ # compile cd $WM_PROJECT_USER_DIR/applications/utilities/waves2Foam ./Allwmake