帖子
-
关于hexRef8 : Dumping cell as obj to ".../cell_813430.obj"的问题 -
前处理,进口面问题 -
Paraview如何自定义时间间隔 -
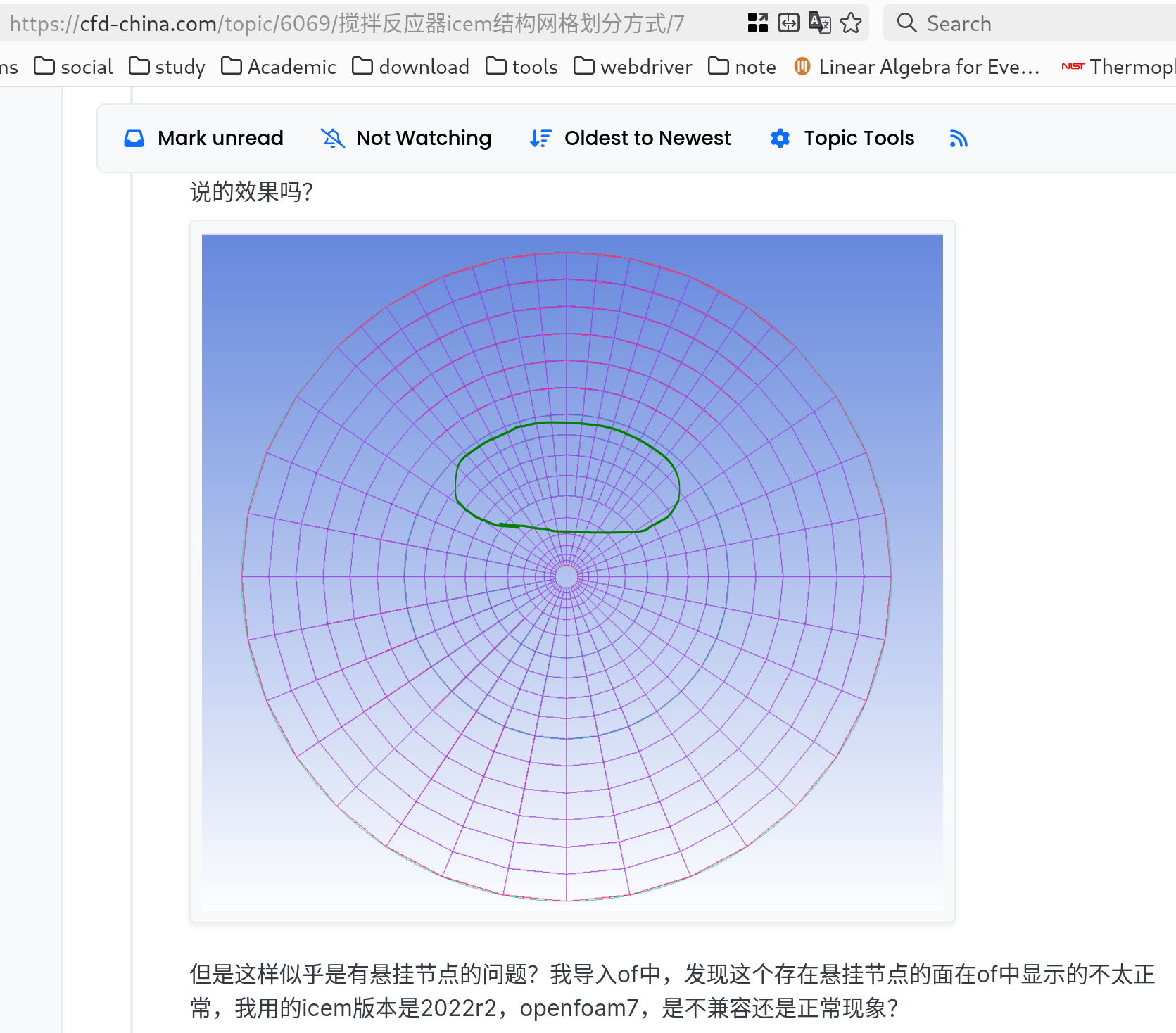
前处理,进口面问题虽然我没画过这类网格,但“两个网格边界组合对应一个相邻网格”这种操作应该挺普遍的,因为按区域加密是个挺普遍的需求,比如这个教程里:
-
关于集群计算积累buff/cache缓存过高的处理办法 -
paraview显示不了粒子,应该怎么设置呢 -
Openfoam 每隔一段时间更新流场 -
关于集群计算积累buff/cache缓存过高的处理办法性能上的设置,只会影响速度,不会影响“炸不炸”。buff/cache 是用来加速的,所以,即使没有,顶多慢,不会炸。
应该是内存炸了,swap太太小了,个人计算机都不会这么小。可以把swap理解为虚拟内存。物理内存不够用,就会暂时使用虚拟内存。虽然虚拟内存慢,总不至于完全无法工作。要是物理内存用完了,虚拟内存也用完了,就会炸。
有一次OpenFOAM的大赛版本升级,导致编译的时候需要十几G的内存,很多人都炸了还找不到原因。
一般 swap 设置为真实内存的一倍就差不多了。古早时候个人计算机内存小,2G、4G的时候,虚拟内存都设置为三倍左右。现在大了,一倍就差不多了。你这个服务器内存也够大了,哪怕0.5倍呢;再大了即使不炸,也会很慢;结果4G。。。。
按说那么大内存,能控制好计算任务范围,不用虚拟内存也行。但是你们那么多人用。调大了,即使不炸也会很慢。swap就是抗一下内存占用尖峰,保证不炸,不能依靠。
另外,很多人用fluent不知道怎么杀干净,留一堆僵尸进程,也会很影响性能。如果有很多cleanup开头的fluent脚本,就是了。正常关闭不会留下这些文件。异常退出就是要用这些文件清理僵尸进程
-
在工作站中测试openfoam并行效率很低,大佬们帮忙看看是什么导致的呢@w352405196 对于单个CPU而言,所有的核都用上,不会是最快的,但是慢多少说不清楚。
因为还要留几个核做些调度工作,(往底层说是芯片上任务分支判断、多任务切换上下文转换、堆栈策略什么的,往系统上说是系统本身有些服务进程一直在后台运行)
32核跨CPU效率高。可以解释为,对于单个CPU而言,满载32个核都用来任务,还得时不时停下任务做些任务调度工作,所以慢些。分到两个CPU。每个CPU。一半核用于调度工作,一半核用于计算任务。快些也合理。
当8核的时候。无论是单个CPU还是两个CPU运行,都会有一部分核空闲用于随时的任务调度工作。所以,分到两个CPU上反而慢一些。因为CPU间通信会耗时一些。两个CPU互相不知道对方的工作状态,不如单个CPU统一调度效率高。这个现象也可以理解。
如果把计算任务理解成打仗。不能让所有人都上战场(所有核用于计算),得留几个人搞后勤支援。否则,就得有些人一会披上铠甲打仗,一边系着围裙搞后勤。后勤保障不上,拖慢整体进度。相比于整体进度拖慢,做后勤的那个核因为做后勤而降低的打仗效率反而不重要了。
而且,核多不一定快。
核越多,核间通信的时间成本越大,核间任务调度算法越麻烦,调度效率也越低(总是难免核间互相等待对方的结果才能继续自己的)。如果横轴表示计算用的CPU核数量,纵轴表示计算用时,那应该是两头高,中间低。
影响的因素很多,得具体分析瓶颈在哪里。
-
在工作站中测试openfoam并行效率很低,大佬们帮忙看看是什么导致的呢@w352405196 两个CPU呀,那要考虑主板总线带宽的影响了。
线程开的越多,CPU交换数据越频繁。总线堵了,速度可不是上不去了。
CPU和内存交换数据也是要通过总线的。所以,程序即使往硬盘读写不频繁。但是计算一定要从内存读指令和数据的。所以,可以查查你的主板型号,看看它的总线对多CPU或者说高性能计算的支持怎么样
-
在工作站中测试openfoam并行效率很低,大佬们帮忙看看是什么导致的呢@w352405196 CPU呀,都顶到100%了。
硬盘读写都为0,说明硬盘没限制速度。
还有不小的上传下载流量。这个计算是跨节点的?
进程gs_test只占用60%左右,cpu都能顶到100%。这是还有些进程因为权限没显示出来。
可能和网络通信有关
-
在工作站中测试openfoam并行效率很低,大佬们帮忙看看是什么导致的呢 -
openfoam火灾燃烧模拟 -
openfoam火灾燃烧模拟 -
如何在把下面这个东西画成图 -
求助,在使用interdymfoam得到结果以后如何计算得到船舶的纵倾与横摇呢@CFDngu 这个运算符重载真是。。。放右边结果是左乘。。。
无论是左乘还是右乘,都没有交换律。所以,应该都不是一个角度分两次旋转、旋转顺序的问题。然后
6DoF定义的orientation叫做“rotation tensor”
这个,是因为,应该是这样的:所有船体与外界的交互,都是基于世界坐标系的。所以要把世界坐标系的力应用到船体上,就要把力之类的各种矢量张量旋转到船体坐标系去和船体交互。
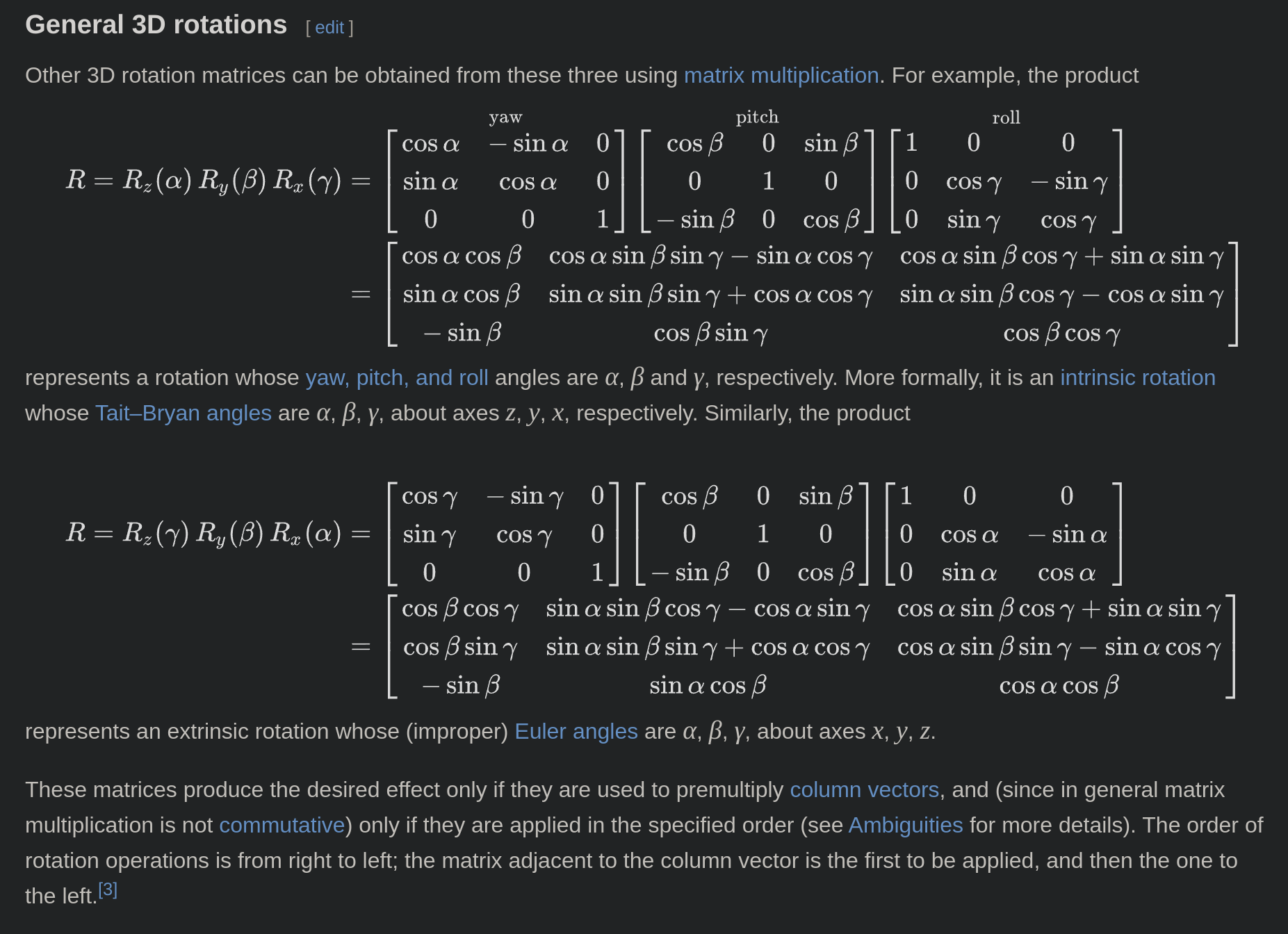
还有另外一个猜测。两个坐标系之间的转换,可以通过三个旋转矩阵达到。也可以通过一个旋转轴和一个旋转矩阵达到。
我猜测,可能这个
0.5Rx-0.5Ry-Rz-0.5Ry-0.5Rx
是在组那一个旋转矩阵,或者找那一个旋转轴。如果有了这个特殊的旋转轴,那么船体的"orientation"就确实是“rotation tensor”了
以上都是我猜的
_(:3」∠)_哦,对了,这句"所以要把世界坐标系的力应用到船体上,就要把力之类的各种矢量张量旋转到船体坐标系去和船体交互。"不是猜的。是代码注释:
Angular momentum stored in body fixed reference frame. Reference orientation of the body (where Q = I) must align with the cartesian axes such that the Inertia tensor is in principle component form. Can add restraints (e.g. a spring) and constraints (e.g. motion may only be on a plane).
The time-integrator for the motion is run-time selectable with options for symplectic (explicit), Crank-Nicolson and Newmark schemes.
我应该理解对注释了吧

-
求助,在使用interdymfoam得到结果以后如何计算得到船舶的纵倾与横摇呢@CFDngu 我看了搜了一大堆也没搞懂。但是可以明确一点。这个操作不是“把旋转分两次完成”。因为矩阵没有交换律,所以先转后转不一样,这是matlab测试代码
Rx = rotx(36); Ry = roty(20); Rz = rotz(80); ori = Rx * Ry * Rz Rx2 = rotx(18); Ry2 = roty(10); Rz2 = rotz(40); split1 = Rx2 * Ry2 * Rz2 * Rz2 * Ry2 * Rx2 split2 = Rx2 * Rx2 * Ry2 * Ry2 * Rz OUTPUT: ori = 0.1632 -0.9254 0.3420 0.8316 -0.0575 -0.5523 0.5308 0.3746 0.7602 split1 = 0.1383 -0.8604 0.4906 0.9844 0.0650 -0.1635 0.1088 0.5055 0.8559 split2 = 0.1632 -0.9254 0.3420 0.8316 -0.0575 -0.5523 0.5308 0.3746 0.7602split1就是OF里的操作,和ori完全不一样。
split2和ori结果一样,因为只是旋转分成两次,而不是还交换顺序
旋转的内容好像也不是角度?
pi是力矩相当于“旋转”中的力。惯性矩相当于“旋转”中的质量。力除以质量是加速度。加速度乘以时间是速度增量。当然这里的"速度"是“旋转”中的速度,即角速度。1/2 * t * a是啥,参考匀变速运动公式,还是能找到挺多意义的。但是把这些东西乘起来。。。猜不出来。得结合更多的代码上下文看了。不过我没用过这个求解器,不太了解。 -
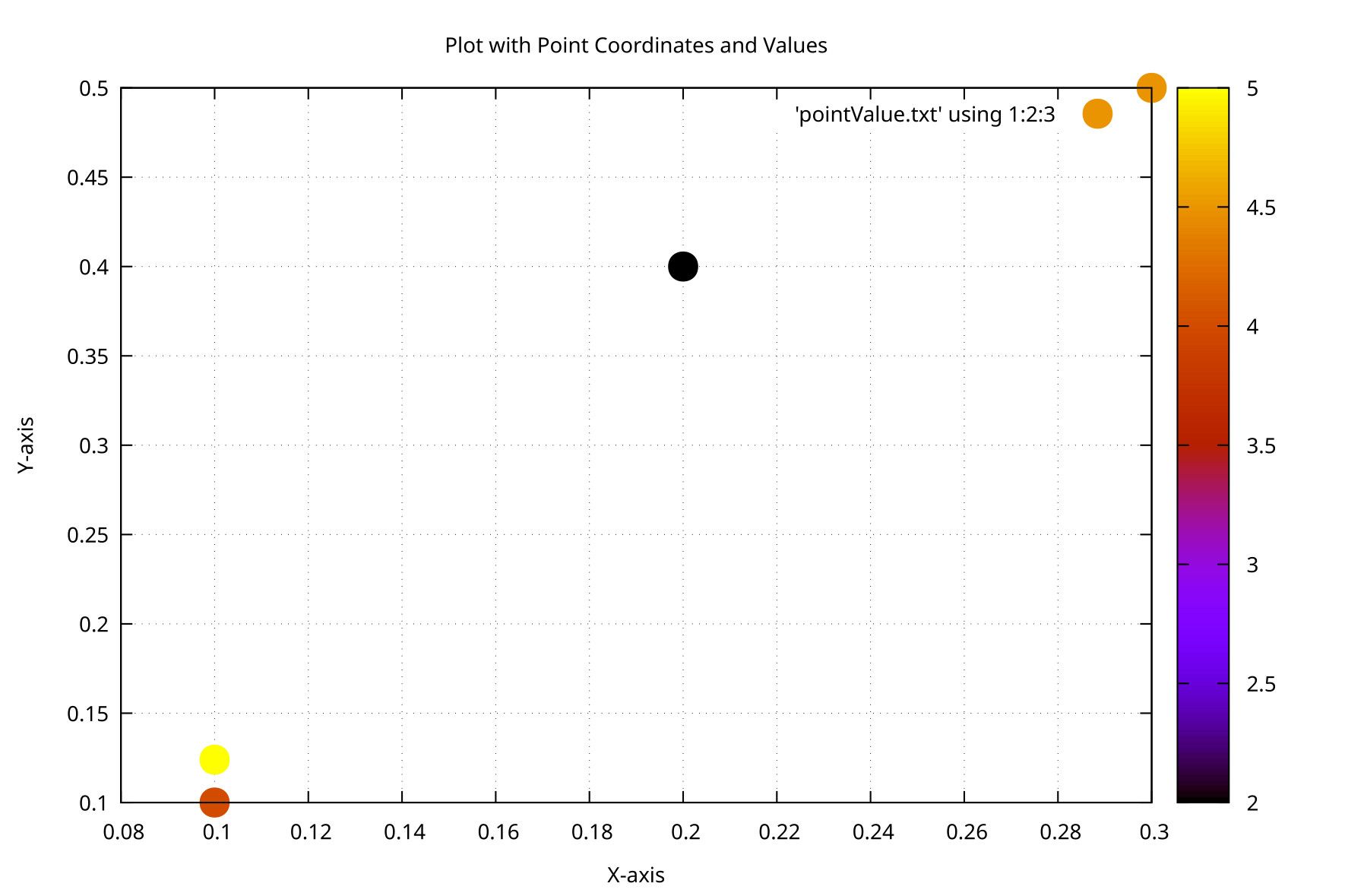
如何在把下面这个东西画成图# x y z 0.1 0.1 4 0.1 0.124 5 0.2 0.4 2 0.3 0.5 4.5set terminal pdfcairo enhanced color size 15cm,10cm font 'Verdana, 10' #set terminal pngcairo size 800,600 enhanced font 'Verdana,10' # Set output file set output 'pointValue.pdf' # Set title and labels set title 'Plot with Point Coordinates and Values' set xlabel 'X-axis' set ylabel 'Y-axis' set zlabel 'Z-axis' # Set grid set grid # Set data style set style data points # Load the data file and plot it plot 'pointValue.txt' using 1:2:3 with points pointtype 7 pointsize 1.5 palette -
求助,在使用interdymfoam得到结果以后如何计算得到船舶的纵倾与横摇呢 -
OpenFOAM与libtorch的数据对应@李东岳 在 OpenFOAM与libtorch的数据对应 中说:
我刚试了一下,如果是140140的网格,总共19600个单元。pixel - 1 - i + jpixel最大编号干到140-1 - 139 + 139*140是19460?
由李老师的第一贴里的图片可知OpenFOAM方格里,最大索引数字是24,在右上角。
右上角在libtorch里的坐标是(0, pixel)
所以应该是
pixel - 1 - i + j*pixel = 140-1-0+139*140=19599这个公式不只是二维数组切换成一维数组(二维数组写成一维很简单,乘以行长加一起就行了)
这个公式还完成了一个“旋转”。旋转的是“递增索引”的方向。OpenFOAM是竖着从下往上。libtorch是横着从左往右。所以有点绕。
pixel = 5就是我写的公式了,我和大佬想一起了,真是英雄所见略同
(。・`ω´・)


 ,效果很好。还能把点调大点,调成正方形,然后就可以没有空隙了。pointtype, pointsize这些
,效果很好。还能把点调大点,调成正方形,然后就可以没有空隙了。pointtype, pointsize这些